|  | |
|
| |
Універсальний маніпулятор
По 1 етапу в НУ “ЛП” разом з ВО “Автовантажмаш”проводилися дослідження по створенню експериментального автонавантажувача, який був оснащений модернізованим базовим маніпулятором обробки вантжів. Особливістю модернізованого маніпулятора було використання його для широкого спектру різнотипних вантажів, а також надання йому функції центрування вантажу. В перспективі передбачалося забезпечення маніпуляторові можливості зважування вантажу. В робочих циклах операція зважування використовувалася як окремий елемент технологічного процесу переробки вантажу. Суміщення її з операціями центрування і транспортування - перспективний шлях підвищення ефективності використання автонавантажувача в робочих циклах. Наступним кроком планувалося створення комплексної системи керування автонавантажувачем. Системи автоматичного керування використовуються для оптимізації роботи трансмісії і частково системи гальмування. При роботі з вантажем використовуються тільки інформаційні пристрої. Розширення меж застосування таких систем підвищило б продуктивність і безпеку роботи автонавантажувачів. Основна проблема, що стримує широке використання систем автоматичного керування - їх вартість. Тому при розробці експериментального автонавантажувача виникла ідея створення комплексної системи керування. За рахунок інтеграції функцій відпала б необхідність дублювання її елементів, що дозволило б значно спростити і здешевити систему.
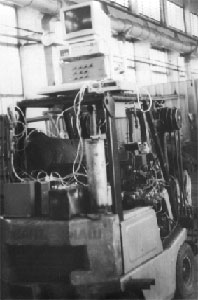
Рис. Автонавантажувач 40928 з універсальним маніпулятором обробки вантажу
|
|
| | |
|