|
| |
| |  | Green Glade Project |
On April 26, 1986 at Chernobyl nuclear power-station there was an explosion in the 4th power unit as the result of which the roof of the reactor hall was completely destroyed. The reactor itself was also destroyed, the power of the nuclear radiation was one hundred times stronger than when there was an explosion of the atomic bomb in Hiroshima.
As the result of the explosion a large amount of radioactive graphite rods was thrown onto the destroyed roof of the reactor. For taking them away military men were mobilized. In order to protect people from dangerous radiation they were dressed into leather suits with lead plates sewn inside. One person was allotted about one minute for going up the reactor’s roof, throwing down one-two spades with the graphite and coming back. For that period of time a person received radiation dose for several years.
It was in that period of time that people started thinking about using robots. Japanese specialists being the specialists in the sphere of radiation sent robot-cleaner to the USSR. But as the result of extremely high gamma-radiation all the electronic blocks of the device got faulty after a few hours of work at the roof. The situation with the robots which were brought from Germany was analogous.
However, all the radioactive graphite was still cleared away by people and the reactor was covered with the concrete sarcophagus 71 metre high with the walls being sometimes 17 metres thick. Construction of this building was made assisted by the automated cranes with the video surveillance system.
The destroyed reactor was left forgotten for about ten years.
Problems started arising when the period of the exploitation of the object “Coverage” was over (10 years). The sarcophagus is situated on the crust break-up that is why gradually with time as the result of it many cracks appeared and radioactive nuclides started getting quite deep into the soil waters.
That was when an alternative started to be thought about. Most developed were two ideas: construction of a new sarcophagus and the idea of a “green meadow”. The idea of a “green meadow” consists in complete reverse engineering of the remnants of the destroyed reactor and sarcophagus and their further burial. The place of the old reactor would be covered with soil and sown with the plants seeds – a “green meadow” would be created. However, probably due to the lack of money, this idea was renounced. Most wide-spread was the idea of the construction of a new sarcophagus for which the funds of foreign states were allotted. Construction of the new sarcophagus presents an additional load (two sarcophagi and a destroyed reactor) at the place of crust fraction and still postponing of the problem 10-15 years.
That is why there again arises the problem of reverse engineering of the destroyed reactor. In order to do this it is necessary to create robotic machines new in principle. Principally new for them should be both power supply sources and systems of drive of working bodies and the algorithms of their functioning. Prospective are mechanic power accumulators – gyroaccumulators. Along with viriators they can constitute the power supply sources which will provide for the robot’s functioning. In the area of increased radioactivity there arise considerable radio obstacles. That is why it is necessary to elaborate algorithms of autonomous functioning for mobile robots. Along with that they should collect information, interpret it preliminary in terms of its operating task. When getting back to the gyroaccumulators recharge station they should transfer it to the central computer and receive correcting amendments relating to their work on the basis of the surveillance cameras. In order to elaborate such algorithms it is expedient to use the experience of functioning of neuronetworks as well as the experience of such living colonies as bees and ants on the basis of bionics.
In order to deconstruct the remnants of the 4th power unit and the old sarcophagus it is necessary to use a complex of robotic construction machines.
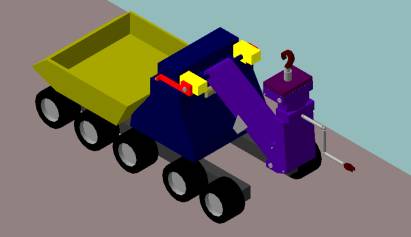
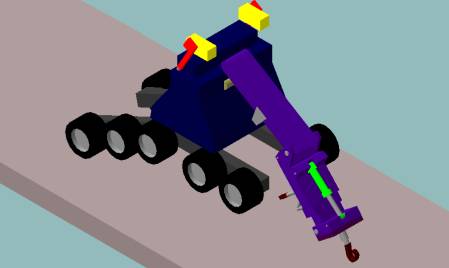
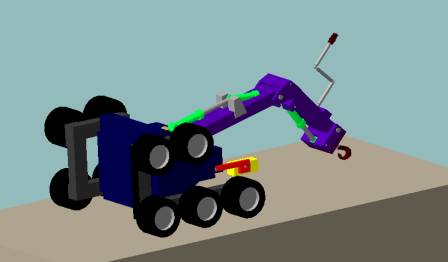
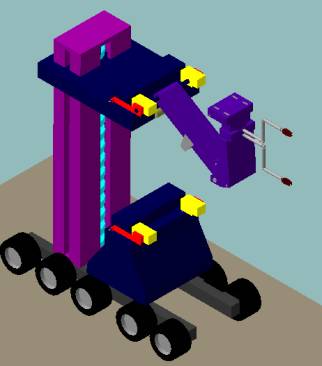
In order to carry out survey and monitoring research as well as in case of atypical situations while deconstructing heaps, it is worth involving universal autonomous devices (drawing 1).
Drawing 1. Variant of universal autonomous devices arrangement
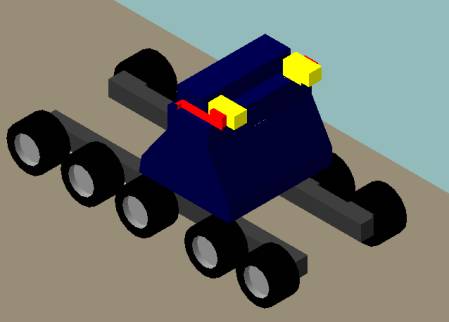
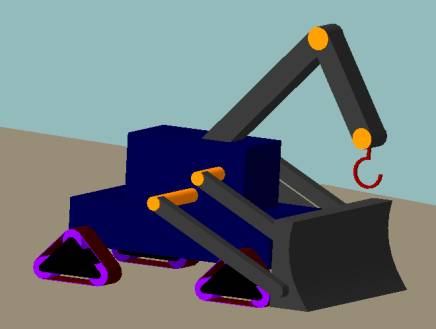
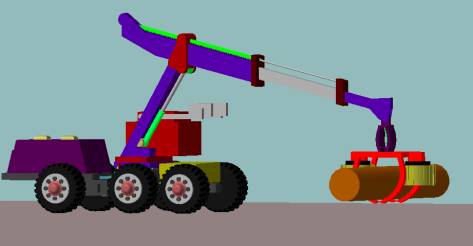
In case the territory is cleaned according to the typical algorithm it is worth creating a range of specialized variants (drawing 3) on the basis of the basic robot chassis. Cleaning should be made sector by sector, and transport corridors should be cleaned beforehand. And it is expedient to use robotic cleaning bulldozers (drawing 2, б). This device can look like the usual tractor with the grab and the crane-manipulator. It is suggested to use 3 triangular caterpillar movers. Caterpillar rollers are located in the angles of the equilateral triangle and caterpillars are put on them. caterpillars can be both metallic and rubber. Such a caterpillar is stuck to the driving axes which is located in the centre of the triangle. And this mechanism can rotate directly around the leading axes which improves machine cross-country ability. Gyroaccumulator is also planned as an engine for it.
Drawing 2. The scheme of the basic chassis of a mobile robot and a robotic bulldozer.
 a) | b)
| | c)
d)
| 
e)
|
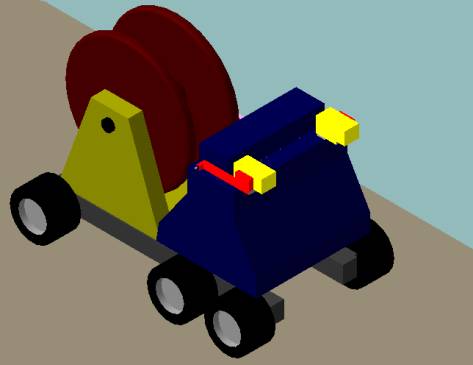
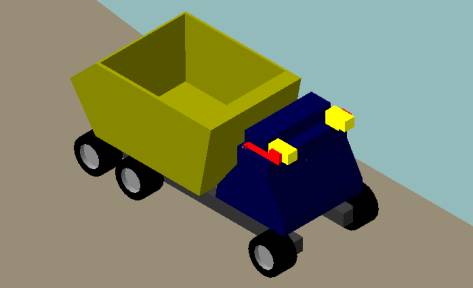
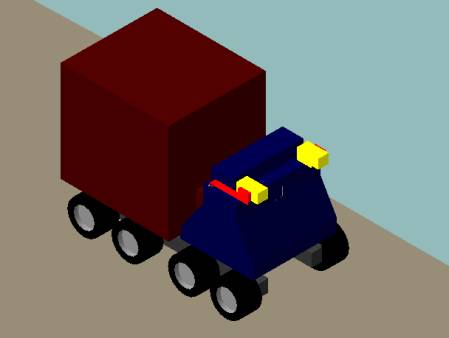
Drawing 3. The schemes of specialized robots: a) robot-cleaner; b) robot-communicator; c) robot-transporter; d) robot-generator; e) robot for reverse engineering of high-rise constructions.
|
|
| | |
|