26 квітня 1986 року на Чорнобильській АЕС стався вибух на 4-му енергоблоці, внаслідок якого було повністю зруйновано дах реакторного залу. Також був зруйнований сам реактор, потужність ядерного випромінювання була в сто разів сильніша, ніж при вибуху атомної бомби в Хіросімі.
Внаслідок вибуху на зруйнований дах реактора було викинуто велику кількість радіоактивних графітових стрижнів. Для їх прибирання мобілізували військових. З метою захисту людей від небезпечного опромінення їх одягали у шкіряні костюми зі свинцевими пластинами, вшитими всередину. Людині виділялося часу близько хвилини для того, щоб піднятись на дах реактора, зкинути одну-дві лопати з графітом і повернутись назад. За цей час людина отримувала кількарічну дозу опромінення.
Саме у цей час почали задумуватися над використанням роботів. Японські фахівці, будучи спеціалістами у сфері радіації, прислали СРСР робота-прибиральника. Але внаслідок надзвичайно високого гамма-випромінювання всі електронні блоки машини через кілька годин роботи на даху вийшли з ладу. Аналогічно було з роботами, яких привезли з Німеччини.
Але весь радіоактивний графіт все ж-таки прибрали люди і реактор був накритий бетонним саркофагом, висотою до 71 метра і товщиною стін подекуди до 17 метрів. Зведення цієї споруди здійснювалося за допомогою автоматизованих кранів з системою відеоспостереження.
На десять років про зруйнований реактор забули.
Проблеми почали виникати тоді, коли термін експлуатації об’єкту «Укриття» підійшов до кінця (10 років). Саркофаг стоїть на розломі кори, тому з часом він дав осадку, внаслідок чого в ньому утворилося багато тріщин і радіонукліди почали потрапляти у грунтові води на досить велику глибину.
Саме тоді почали задумуватися над альтернативою. Найбільшого розвитку набули дві ідеї: спорудження нового саркофагу та ідея «зеленої галявини». Суть ідеї «зеленої галявини » полягає у повному розбиранні рештків зруйнованого реактора та саркофага і наступному їх захороненні. Місце старого реактора було б засипано грунтом і засіяно насінням рослин – булу б створена «зелена галявина». Але від цієї ідеї, напевно за браком коштів, відмовились. Найбільшого поширення набула ідея про спорудження нового саркофага, для якого були виділені кошти іноземних держав. Побудова нового саркофага – це додаткове навантаження (два саркофага і зруйнований реактор) в місці розлому кори і знову ж відкладення проблеми на 10 – 15 років.
Тому знову постає проблема розбирання зруйнованого реактора. Для цього потрібно створити принципово нові роботизовані машини. Принципово новими в них повинні бути як джерела енергії і системи приводу робочих органів так і алгоритми їх функціонування. Перспективними є мехінічні накопичувачі енергії – гіроакумулятори. Разом з віріаторами вони можуть бути тими джерелами енергії, що забезпечуватимуть функціонування робота. У зоні підвищеної радіоактивності виникають суттєві радіозавади. Тому для мобільних роботів необхідно розробити алгоритми автономного функціонування. При цьому вони повинні збирати іформацію, попередньо її інтерпритувати стосовно свого робочого завдання. При поверненні на станцію підзарядки гіроакумулятора передавати її на центральний комп’ютер і отримувати коригуючі поправки стосовно своєї роботи на основі камер спостереження. Для розробки таких алгоритмів доцільно скористатися досвідом функціювання нейромереж, а також на основі біоніки використовувати досвід таких живих колоній як бджоли та мурахи.
Для розбирання залишків 4-го енергоблока та старого саркофага необхідно використовувати комплекс роботизованих будівельних машин.
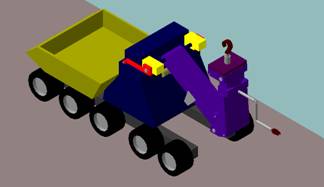
Для проведення розвідувальних та моніторингових досліджень, а також у випадку нетипових ситуацій при розбиранні завалів, варто задіювати універсальні автономні машини (рис.1).
Рис. 1. Варіант компоновки універсальної автономної машини
У випадку очищення території за типовим алгоритмом варто на основі базового шасі робота (рис.2, а) створити ряд спеціалізованих варіантів (рис.3). Зачищування варто проводити по секторах, попередньо розчистивши транспортні коридори. При цьому доцільно використовувати розчищувальні роботизовані бульдозери (рис.2,б). Ця машина може бути схожа на звичайний трактор з ковшем та краном-маніпулятором. Пропонується використання 3-х трикутних гусеничних рушіїв. Катки гусениць розміщуються у кутах рівностороннього трикутника і на них надягаються гусениці. Гусениці можуть бути як металічними, так і гумовими. Така гусениця кріпиться до приводної осі, яка розміщається у центрі трикутника. Причому цей механізм може безпосередньо обертатися навколо ведучої осі, що покращує прохідність машини. Двигуном для неї теж планується використати гіроакумулятор. Рис. 2. Схема базового шасі мобільного робота і роботизованого бульдозера
Рис. 3. Схеми спеціалізованих роботів: а) робот прибиральник; б) робот-комунікатор; в) робот-транспортувальник; г) робот-генератор; д) робот для розбирання висотних конструкцій.
|