|
| |
| |  | Chapter II |
The second chapter the meaning of the methods of modeling and researches of mobile machines with variable center of weight (MVCW). The described, mathematical model of functioning of MVCW and applied software for their computer realization were created, which give an oportunity to indicate efficiency of the technological cycles as a whole and their parts - elementary operations. It gaves possibility to make comparison of efficiency of functioning of MVCWof different groups.
For formalization of the process of modeling MVCW the structural graphs of plate constructive schemes were used,
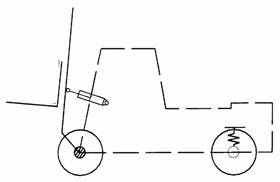
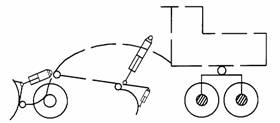
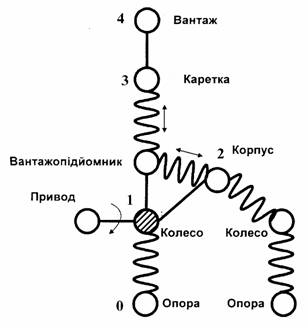
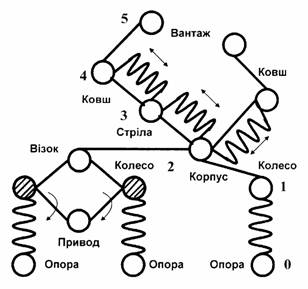
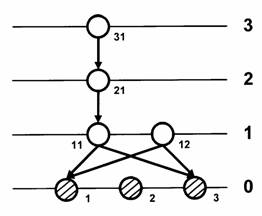
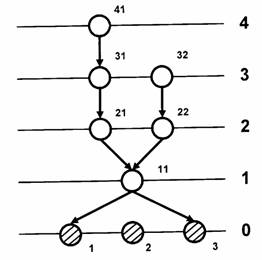
Для формалізації процесу моделювання МЗЦМ застосовувалися структурні графи плоских конструктивних схем, в яких та чи інша ланка машини відображається кружком (заштрихований кружок позначає наявність приводу), кінематичний жорсткий зв’язок між двома ланками — прямою лінією, а пружний — хвилястою; пружний зв’язок із стрілкою — активний; при ньому можуть змінюватися кутові або лінійні відстані між ланками. Структури плоских конструктивних схем МЗЦМ поділено на шість груп за так званим критерієм подібності графів. Для прикладу, на рис. 1 схемно відображено структури двох типів машин — автонавантажувача та автогрейдера, — а на рис. 2 — відповідні структурні графи зв’язків між узагальненими координатами в математичних моделях цих машин (тут цифри біля горизонтальних прямих позначають рівні зв’язків, а цифри біля кружків — коди структурних елементів машини). Графи структури зв’язків між узагальненими координатами відрізняються між собою: кількістю координат нульового рівня, що зумовлено кількістю ведучих коліс та приводів виконавчих механізмів; наявністю чи відсутністю розгалужень на рівнях залежностей вище першого та кількістю рівнів залежностей.
Для розв’язування задач Коші була застосована високоефективна комп’ютерна програма XEMI, в якій реалізовано модифікований предикатор-коректор методу Хеммінга. Це стійкий метод четвертого порядку, який вимагає тільки двох обчислень правих частин рівнянь системи на кожному кроці інтегрування.
a) b)
Fig.1. Examples of structural schemes:
а — Fork lift truck; b — Grader.
а) б)
Fig. 2. Graphs of the structures of the links among generalized coordination's in mathematic model of functioning according to the schemes (fig.1).
|
|
| | |
|